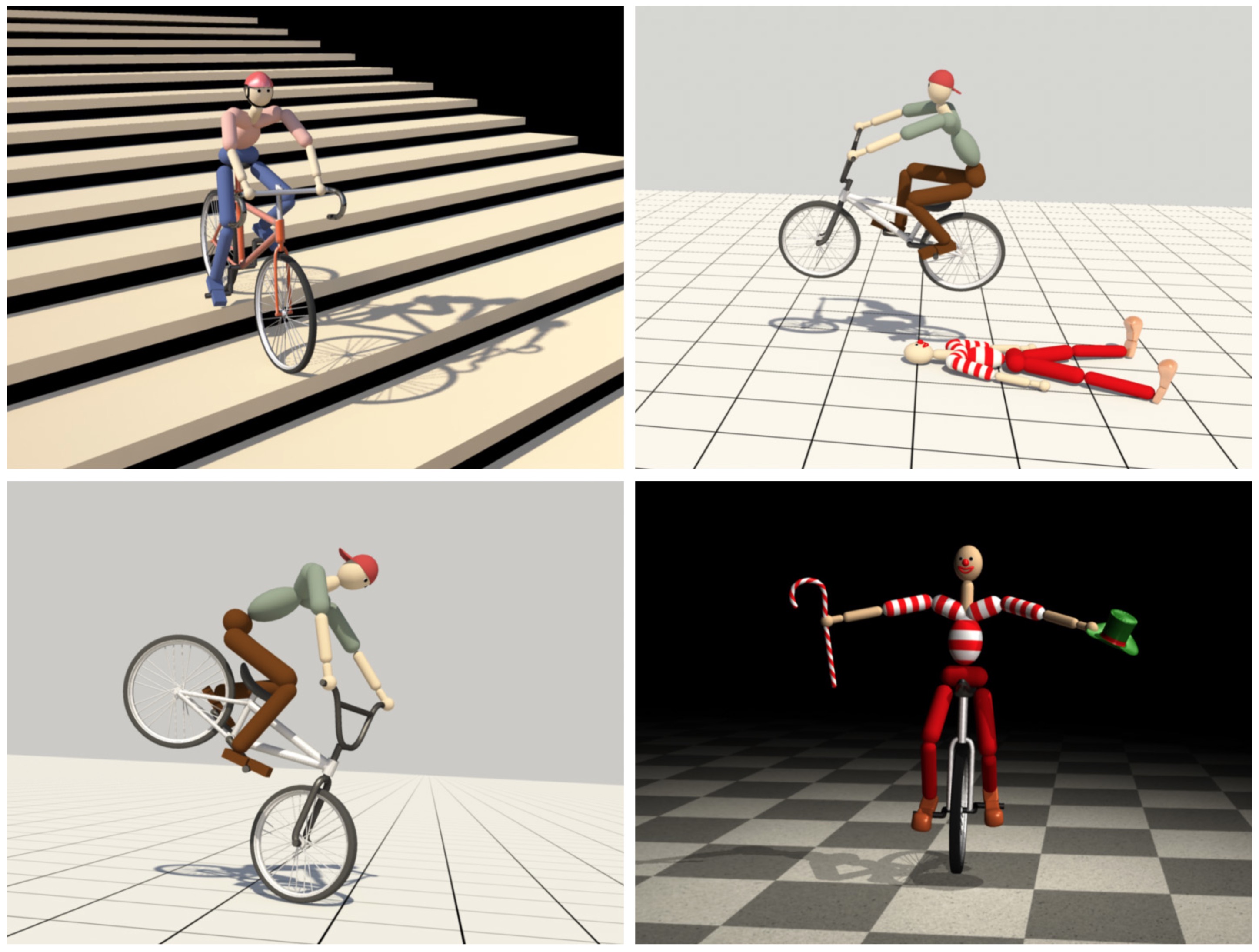
We present a general approach for simulating and controlling a human character that is riding a bicycle. The two main components of our system are offline learning and online simulation. We simulate the bicycle and the rider as an articulated rigid body system. The rider is controlled by a policy that is optimized through offline learning. We apply policy search to learn the optimal policies, which are parameterized with splines or neural networks for different bicycle maneuvers. We use Neuroevolution of Augmenting Topology (NEAT) to optimize both the parametrization and the parameters of our policies. The learned controllers are robust enough to withstand large perturbations and allow interactive user control. The rider not only learns to steer and to balance in normal riding situations, but also learns to perform a wide variety of stunts, including wheelie, endo, bunny hop, front wheel pivot and back hop.
Riding down stairs, bunny hop, endo and unicycle.
This material is based in part upon work supported by the National Science Foundation under grants CCF-811485 and IIS-11130934. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation.
Go to Greg Turk's Home Page.