We present a new method of surface reconstruction that generates smooth and seamless models from sparse, noisy, non-uniform, and low resolution range data. Data acquisition techniques from computer vision, such as stereo range images and space carving, produce 3D point sets that are imprecise and non-uniform when compared to laser or optical range scanners. Traditional reconstruction algorithms designed for dense and precise data do not produce smooth reconstructions when applied to vision-based data sets. Our method constructs a 3D implicit surface, formulated as a sum of weighted radial basis functions. We achieve three primary advantages over existing algorithms: (1) the implicit functions we construct estimate the surface well in regions where there is little data; (2) the reconstructed surface is insensitive to noise in data acquisition because we can allow the surface to approximate, rather than exactly interpolate, the data; and (3) the reconstructed surface is locally detailed, yet globally smooth, because we use radial basis functions that achieve multiple orders of smoothness.
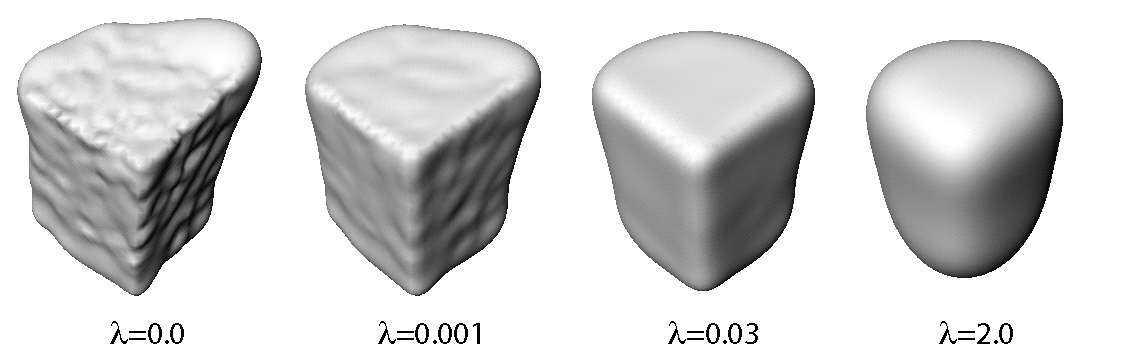
Varying lambda to adjust the balance between interpolation and approximation, using synthetic data.
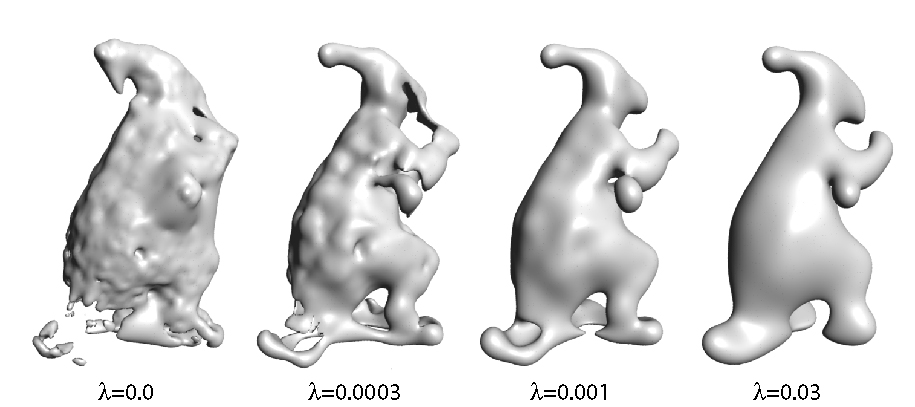
Adjusting the balance between interpolation and approximation for voxel carving data.
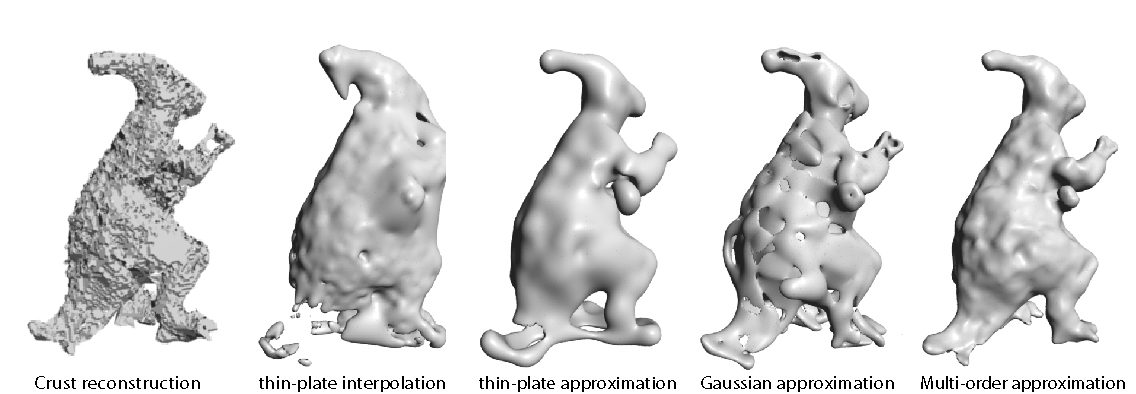
Comparison between different basis functions, as well as to crust algorithm.
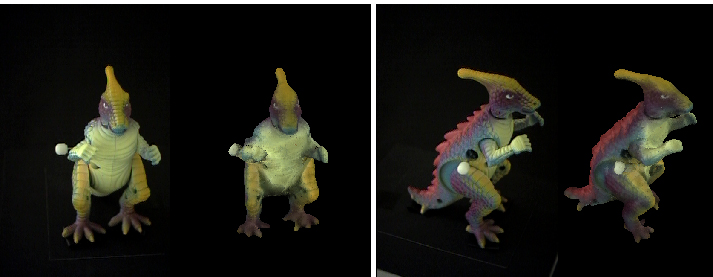
Comparisons of two photos of a dinosaur model with surface reconstructions using our method.
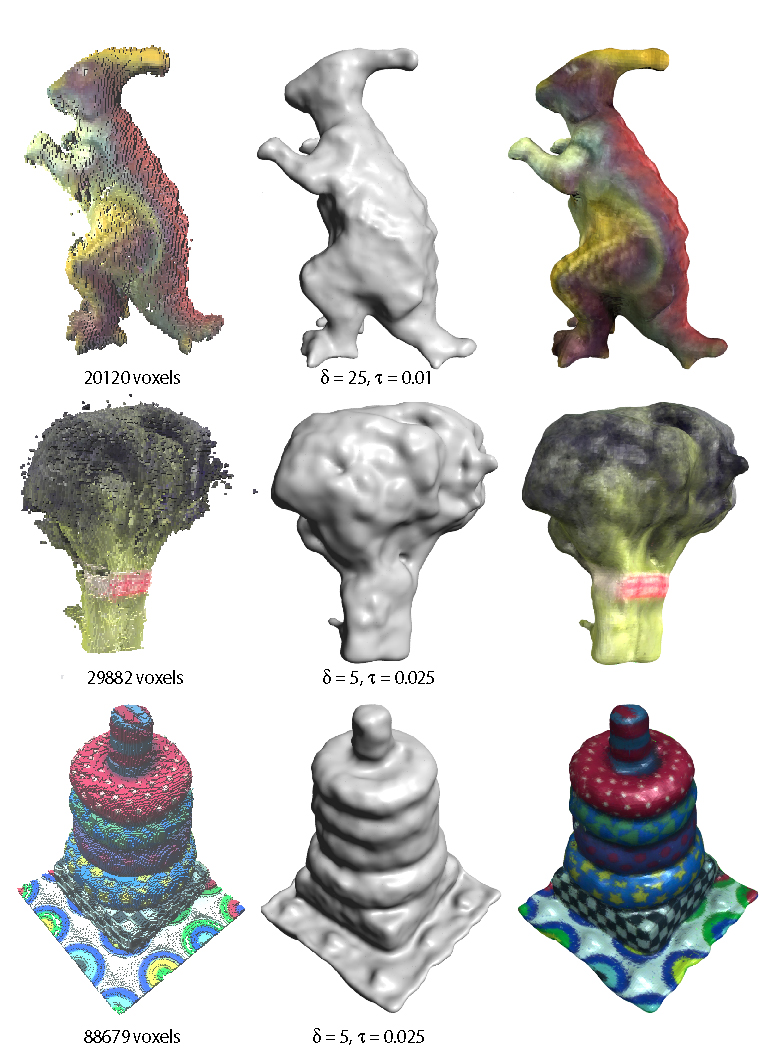
More reconstructed models.
Go to Greg Turk's Home Page.