Associate Professor, Georgia Institute of Technology
✉ dhekne_at_gatech.edu
Mapping the Progress of NSF CAREER AWARD - 2145278
This webpage lists all the work performed under this NSF Grant. Updated 08/23/2024
Back to Home Page
Ashutosh Dhekne
Associate Professor, Georgia Tech Mapping the Progress of NSF CAREER AWARD - 2145278
Project Synopsis
CAREER: Closing the Gaps in UWB Localization and Sensing; Algorithms, Architectures, and Prototypes
Award# 2145278 [NSF Award Search]
This project proposes to use a new and upcoming wireless technology called ultra-wideband radios to perform indoor localization at the human navigation scale, fine-grained localization at the scale required for object tracking in indoor spaces, and for intrusion detection through monitoring of disturbances to the wireless profile of an indoor space. Several applications can benefit from the underlying constructs developed in this work, including indoor navigation and guidance systems, localization and navigation for autonomous agents in complex indoor spaces, tracking movements of robotic arms for accurate task completion as well as for compliance, and protection of valuables through intrusion monitoring and alarm systems. Thus, the fundamental work in this project is expected to impact several industries and advance mobile computing using wireless technology for localization and sensing.
This research will advance the state-of-the-art in wireless localization and sensing through novel algorithmic and architectural contributions leading to new protocols based on ultra-wideband (UWB) radio technology. This work comprises three research thrusts. In the first, it proposes to enable an infinitely scalable indoor localization technology that can span large indoor spaces, such as shopping malls, museums, government buildings, etc. using only a few UWB anchor devices. An unlimited number of users can derive their own location inside provisioned indoor spaces using UWB receivers that overhear signals sent by installed anchor devices, without transmitting any UWB signal, thereby ensuring their privacy. In the second research thrust, a fine-grained 3D localization idea is proposed which exploits specific channel patterns obtained using multiple antennas at a receiver. The phase of the received wireless signals is compared to provide fine-grained localization of objects or robotic arms in a relatively small space. Such a system can track exact robotic movements without using cameras, a significant advantage when operating in dark, dusty environments, and when the large amount of data produced and processing needs of cameras are not desirable. In the third research thrust, an intrusion detection system is proposed which monitors a protected space by analyzing disturbances in the wireless channel impulse response (CIR). The proposed system would allow friendly entities to freely occupy an indoor space and yet monitor it for intrusions by ignoring CIR disturbances in the vicinity of the friendly entity. Overall, a rich ecosystem of new applications is expected to be enabled by this work.
Personnel
Year 2024-25
Name
Project Role
Duration
Ashutosh Dhekne
Principal Investigator
2 month
Haige Chen
Graduate Student (GRA)
5 months
Fan Jiang
Graduate Student (GRA)
5 months
Rahul Bulusu
Graduate Student (GRA)
2 months
Year 2023-24
Name
Project Role
Duration
Ashutosh Dhekne
Principal Investigator
1 month
Yifeng Cao
Graduate Student (GRA)
6 months
Fan Jiang
Graduate Student (GRA)
6 months
Year 2022-23
Name
Project Role
Duration
Ashutosh Dhekne
Principal Investigator
1 month
Yifeng Cao
Graduate Student (GRA)
9 months
Jinzhi Ye
Student Assistant (SA)
3 months
Thesis
Yifeng Cao, Apr 2024
High-Precision Ranging Matters: Uncovering the Potential of Ultra-wideband radios in Real-world Applications
Collaborators
Cisco Research, 2022, 2023
Cisco funded our group to advance UWB research and incorporating UWB into wireless access points. Incorporating UWB into WiFi access-points is an important step in realizing the overall goals of UWB-based indoor localization and navigation. Ubiqutous presence of UWB chips inside infrastructure such as WiFi APs is expected to lead to significant broader impact of this work.
Publications - Papers Click to Copy Bibtex
IEEE Sensors Letters, 2025
uThaw: Ultra-wideband Wireless Solid-Liquid State Transition Sensor to Detect Thawing of Food
Rahul Bulusu, Ashutosh Dhekne
Click to Copy Bibtex
This paper explores the potential use of ultra-wideband (UWB) wireless sensors in detecting the transition of
food items from a frozen state to thawed state (or vice-versa), marking a significant advancement in monitoring the thawing
process. By exploiting the drastic change in complex permittivity at microwave frequencies (we use frequencies close to
4GHz) during the solid-liquid state transition, this paper introduces a novel approach in ensuring frozen food safety, and
in enhancing the efficiency of the frozen food industry and cold chain transportation. The developed system, capable of
operating through food packaging, offers a non-invasive, cost-effective solution for real-time monitoring, addressing the
limitations of conventional temperature-based and timing-based methods widely used today in household and professional
cooking and in the food industry. Our findings from the raw UWB channel impulse responses (CIR) and computed
similarity scores indeed show significant promise and validate the feasibility of the proposed system with various realworld applications.
IPIN, 2024
uFindMe: A UWB-Based Robotic Package Finder
Nicholas Cich, Rishabh Singhal, Ashutosh Dhekne
This paper explores the problem of seeking a wireless ultra-wideband radio-enabled physical package in a cluttered environment using a mobile robot. We enable a robot to navigate (using LiDAR) to a physical package by continuously calculating the distance from the package (using UWB-based wireless ranging). We assume no explicit support from the surrounding environment where the package is present and, therefore, intend to perform this package-seeking using sensors on the robot and a UWB-wireless radio installed inside the package. We expect such a system to be used for high-value packages or packages with perishable contents. The technical innovations in this paper stem from the robot utilizing its own movements and continuous distance measurements with the UWB inside the package to localize the package and then seek out an approach path for autonomous navigation using LiDAR. We demonstrate our end-to-end robotic system using real-world experiments with varying levels of clutter and navigational complexity.
BodySys, 2024
SigningRing: Signature-based Authentication using Inertial Sensors on a Ring Form-factor
Yifeng Cao, Ashutosh Dhekne, Mostafa Ammar
Click to Copy Bibtex
Commercial smart rings have demonstrated their utility in health applications such as sleep monitoring and fitness tracking. However, given the small size of a ring form-factor, the applicable scenarios of smart rings are still under-explored. This paper presents SigningRing, which proposes a novel functionality for the smart ring: employing the inertial sensor embedded in the smart ring for secure and fast user authentication. To access an account, the user wearing the ring will move their finger in air, tracing a signature-like pattern, as if signing their name. In our evaluation with 18 volunteers, SigningRing achieves 97.4% in balanced accuracy, with 99.8% true negative rate and 95.1% true positive rate.
BodySys, 2024
Position Paper: MoViz: UWB-IMU Sensors as Input to Body-Movement Visualizations
Generating art through body-movements has widespread utility spanning several fields including physical rehabilitation post-surgery, to entertainment, to health and well-being. This paper introduces a new modality available for researchers via distance measurements using ultra-wideband (UWB) devices, in addition to the traditional IMU based approaches. As a versatile tool, UWB allows rich information to be garnered while consuming minimal data bandwidth and requiring minimal computation that can be easily performed on a microcontroller. We showcase some of the art we have generated using this platform and call upon the research community to explore the topic further.
WiSec, 2024
UWB-Auth: A UWB-based Two Factor Authentication Platform
Yifeng Cao, Ashutosh Dhekne, Mostafa Ammar
Click to Copy Bibtex
This paper presents an ultra-wideband (UWB) based two-factor authentication (2FA) platform, called UWB-Auth, designed as carriable or wearable devices. UWB-Auth eliminates various social engineering attacks, including phishing attack, 2FA-fatigue attack, co-located attack etc., on existing 2FA solutions like Duo and reveals simple and fast user interaction. The key innovation of UWB-Auth is a novel combination of location authentication via UWB, checking whether a legitimate token is in the vicinity of the login device with centimeter-level accuracy, followed by an abstraction layer allowing different knowledge-based or biometric-based authentication, ensuring the user's identity and intent to login. Moreover, UWB-Auth reverses the sequence in which the two factors are verified, providing robust defences against data breach. We develop 3 UWB-Auth prototypes: a key-chain token, a smartwatch with commercial knowledge/biometric factor, and a smartring with customized knowledge/biometric authentication algorithm to demonstrate the effectiveness of UWB-Auth. Overall, UWB-Auth completes the whole authentication process in 4 seconds, and completely rejects malicious requests when the token is 20cm or 10 degree outside a small valid physical area near the login device. Even when a malicious entity gains physical access to the token, UWB-Auth stops attack attempts via knowledge and biometric authentication.
MobiSys, 2024
UTrack3D: 3D Tracking Using Ultra-wideband (UWB) Radios
Yifeng Cao, Ashutosh Dhekne, Mostafa Ammar
Click to Copy Bibtex
Recording 3D movements of a user's hand, robotic arms, or an object, even in a small confined space, has several applications in AR/VR, robotics, movement science, and 3D modeling and rendering. Existing camera-based tracking systems, though extremely accurate, are quite expensive and suffer from issues of occlusion and face difficulties when operating in extremely dark or extremely bright environments. We contend that trading-off a bit of accuracy while reducing costs and enabling more flexible operating environment might be worth exploring. This paper presents UTrack3D, a table-top setup that tracks the movements of an object in 3D space using embedded low-cost ultra-wideband (UWB) radios. The core idea is to continuously track the changes in phase as captured from UWB signal's channel impulse response (CIR) derived from the UWB messages received at a set of dual-antenna UWB receivers. Each of our custom dual-antenna receivers captures the UWB signal from two corners of a cuboid allowing us to perform relative phase measurements. The main challenges in the solution are caused by a location-dependant large variation in the signal amplitudes and corruption of the CIR due to multipath. UTrack3D tackles these challenges via a signal processing pipeline fusing a forward localization process which tracks the object's location using UWB CIR phase, and a posterior location check process, which validates the estimated location. UTrack3D is implemented on commercial-off-the-shelf (COTS) UWB chips, and provides a 90th percentile accuracy of 9mm in a table-top 3D region 1.5m x 0.8m x 0.8m. We evaluate the effects of additional UWB receivers, effect of different movement speeds, and effect of small-scale signal blocking using different materials. We expect UTrack3D to allow researchers a rich new environment for further advancing UWB-based 3D tracking.
IEEE JISPN, 2023
Spoofing Evident and Spoofing Deterrent Localization using Ultra-wideband (UWB) Active-Passive Ranging
Haige Chen, Ashutosh Dhekne
Click to Copy Bibtex
This paper presents UnSpoof, an ultrawideband (UWB) localization system that can detect and
localize distance-spoofing tags with a few collaborative
passively-receiving anchors. We propose novel formulations that enable passively-receiving anchors to deduce their time-of-flight (ToF) and time-difference-of-arrival
(TDoA) just by overhearing standard two-way ranging
(TWR) messages between the tag and one active anchor.
Our ToF formulation can be used to precisely localize an
honest tag, and to detect a distance-spoofing tag that
falsely reports its timestamps. Additionally, our TDoA formulation enables spoofing deterrent localization, which can
be used to track down and apprehend a malicious tag.
Our experimental evaluation shows 30 cm 75th percentile
error for ToF-based honest tag localization, and sub-meter
error for TDoA-based localization for spoofing tags. We
demonstrate successful detection of distance reduction
and enlargement attacks inside the anchors’ convex hull,
and graceful degradation outside. Additionally, we show
the effects of a non-regular geometry of anchors and invite
researchers and practitioners to experiment with anchor
topologies of interest to them via our open source modeling
software.
IPIN, 2023
UnSpoof: Distance Spoofing-Evident Localization using UWB
Haige Chen, Ashutosh Dhekne
Click to Copy Bibtex
This paper presents UnSpoof, a UWB localization
system that can detect and localize distance-spoofing tags with
several collaborative passively-receiving anchors. We propose
novel formulations that enable passively-receiving anchors to
deduce their time-of-arrival (ToA) and time-difference-of-arrival
(TDoA) just by overhearing standard two-way ranging (TWR)
messages between the tag and one active anchor. Our ToA
formulation can be used to precisely localize an honest tag,
and to detect a distance-spoofing tag that falsely reports its
timestamps. Additionally, our TDoA formulation enables spooffree localization, which can be used to track down and apprehend
a malicious tag. Our experimental evaluation shows 30 cm
75th percentile error for ToA-based honest tag localization, and
sub-meter error for TDoA-based localization for spoofing tags.
We demonstrate successful detection of distance reduction and
enlargement attacks inside the anchors’ convex hull, and graceful
degradation outside.
IMWUT, 2023
ViSig: Automatic Interpretation of Visual Body Signals using On-Body Sensors
Yifeng Cao, Ashutosh Dhekne, Mostafa Ammar
Click to Copy Bibtex
Visual body signals are designated body poses that deliver an application-specific message. Such signals are widely used for fast message communication in sports (signaling by umpires and referees), transportation (naval officers and aircraft marshallers), and construction (signaling by riggers and crane operators), to list a few examples. Automatic interpretation of such signals can help maintaining safer operations in these industries, help in record-keeping for auditing or accident investigation purposes, and function as a score-keeper in sports. When automation of these signals is desired, it is traditionally performed from a viewer's perspective by running computer vision algorithms on camera feeds. However, computer vision based approaches suffer from performance deterioration in scenarios such as lighting variations, occlusions, etc., might face resolution limitations, and can be challenging to install. Our work, ViSig, breaks with tradition by instead deploying on-body sensors for signal interpretation. Our key innovation is the fusion of ultra-wideband (UWB) sensors for capturing on-body distance measurements, inertial sensors (IMU) for capturing orientation of a few body segments, and photodiodes for finger signal recognition, enabling a robust interpretation of signals. By deploying only a small number of sensors, we show that body signals can be interpreted unambiguously in many different settings, including in games of Cricket, Baseball, and Football, and in operational safety use-cases such as crane operations and flag semaphores for maritime navigation, with > 90% accuracy. Overall, we have seen substantial promise in this approach and expect a large body of future follow-on work to start using UWB and IMU fused modalities for the more general human pose estimation problems.
IPIN, 2022
PnPLoc: UWB Based Plug & Play Indoor Localization
Haige Chen, Ashutosh Dhekne
Best Paper Award
Click to Copy Bibtex
Enabling reliable indoor localization can facilitate several new applications akin to how outdoor localization systems, such as GPS, have facilitated. Currently, a few key hurdles remain that prevent indoor localization from reaching the same stature. These hurdles include complicated deployment, tight time synchronization requirements from time difference of arrival protocols, and a lack of mechanism to allow a pan-building seamless solution. This work explores ways in which these key hurdles can be overcome to enable a more pervasive use of indoor localization. We propose a novel passive ranging scheme where clients overhear ongoing two-way ranging wireless communication between a few infrastructure nodes, and compute their own relative location without transmitting any signals (preserving user privacy). Our approach of performing two-way ranging between infrastructure nodes removes a crucial timing requirement in traditional time-difference-of-arrival methods thereby relaxing the synchronization requirements imposed by previous techniques. We use ultra-wideband wireless (UWB) radios that can easily penetrate building materials so that spanning an entire floor of a large building with just a few infrastructure nodes is possible. We build working prototypes, including the necessary hardware, and demonstrate the plug-and-play nature of our proposed solution. Our evaluation in three indoor spaces shows 1–2 meter-level localization accuracy with areas as large as 2241 sq.m. We expect our explorations to re-trigger interest in novel applications for indoor spaces based on fine-grained indoor location knowledge.
Articles, Posters, Demos
HotMobile, 2024
Poster: Thaw: A UWB-based Ice-Water State Detector
Rahul Bulusu, Ashutosh Dhekne
HotMobile, 2024
Demo: uFi𝜇: An open-source integrated UWB-WiFi-IMU platform
for localization research and beyond
Fan Jiang, Ashutosh Dhekne
HotMobile, 2024
Demo: BYOE: Bring Your Own Earphones
Sajal Narang, Ashutosh Dhekne
NSF PREPARE, 2023
Low Bandwidth Alternative for Online K-12 Education
Yifeng Cao, Ashutosh Dhekne
Click to Copy Bibtex
HotMobile, 2023
Demo: Notification Control and Reminders with UWB Indoor Localization
Vishnu Jaganathan, Ajish Sekar, Ashutosh Dhekne
Click to Copy Bibtex
UbiComp, 2022
Demo: Bringing UWB Indoor Localization Closer to being Universal and Pervasive
Haige Chen, Zixin Yin, Ashutosh Dhekne
Click to Copy Bibtex
UbiComp, 2022
Poster: Towards Hybrid Presence Enabled by Indoor Localization and Holograms
Zixin Yin, Haige Chen, Jinzhi Ye, Ashutosh Dhekne
Click to Copy Bibtex
MobiSys, 2022
Demo: Location-Specific Public Broadcasts
Haige Chen, Zixin Yin, Ashutosh Dhekne
Click to Copy Bibtex
Code and Data
Data from the ViSig Project
Human pose can be inferred from the distances between the hands, feet, the torso, and the head. This fundamental idea is used by our research on body signals published in a paper titled "ViSig: Automatic Interpretation of Visual Body Signals Using On-Body Sensors" in IMWUT 2023. During the experiments, we constructed a body-signal database. That database is available here.
WiFi Broadcasts Filtered by Location
This demo was showcased at MobiSys 2022. The software is run on Raspberry Pi and on Android phones connected to UWB devices. Code is here.
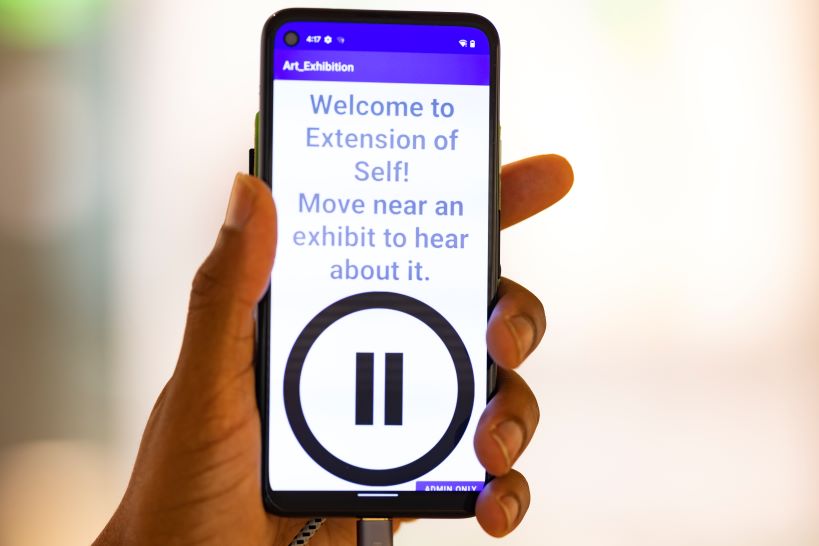
Audio Guide for the Visually Impaired
This software was deployed at the Georgia Tech library exhibition. It allows a visually impaired person to hear the description of different art in the exhibition by simply moving near the art with a specially designed mobile phone. Code is here.
Educational Activities
CS8803-Mobile Computing and IoT
The NSF CAREER award has enabled expanding my graduate class on mobile computing and IoT at Georgia Tech to include a valuable learning experience through a hands-on group project. I had 52 students in Fall 2022 for this course. Each group of 2-3 students proposed an IoT project selecting from general ideas I presented to the class. Each project was different and needed embedded hardware ranging from ultra-wideband radios to microcontrollers to conduction microphones. Equipment required for the projects was purchased through funds from the NSF CAREER award. At the end of the class, a poster session was organized at the Klaus Advanced Computing Building at Georgia Tech, presenting the progress and success of each project. One of the projects was expanded to a demo/poster at HotMobile 2023.
The class was made significantly more engaging through real demonstrations including generative art using UWB sensors, demonstrations of sensor readings in mobile computing, holograms, etc. I was selected to be on Georgia Tech's Fall 2022 Honor Roll for excellence in teaching for this course. I was once again selected to be on Georgia Tech's Fall 2023 Honor Roll for excellence in teaching for this course.
Broader Impact
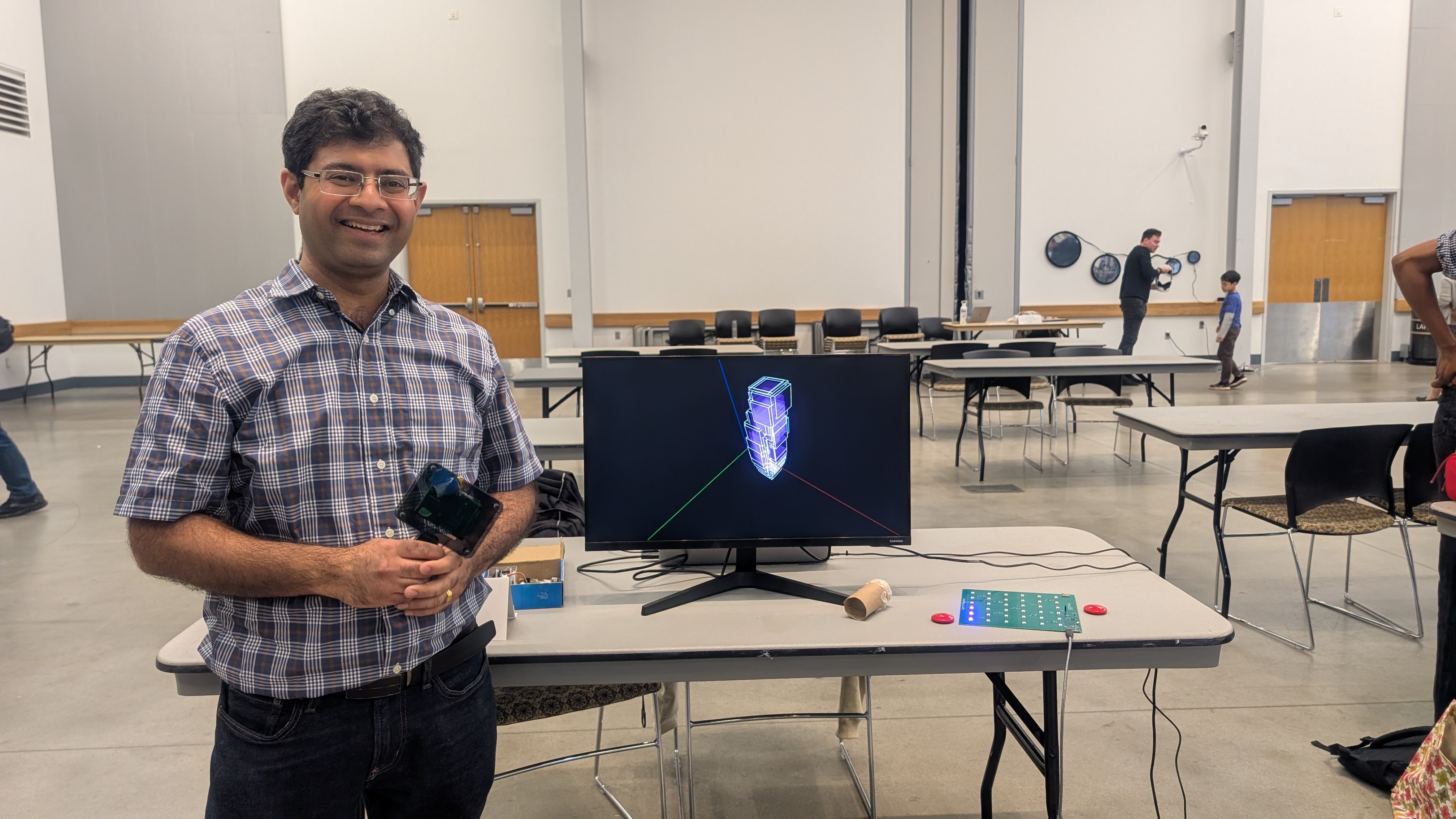
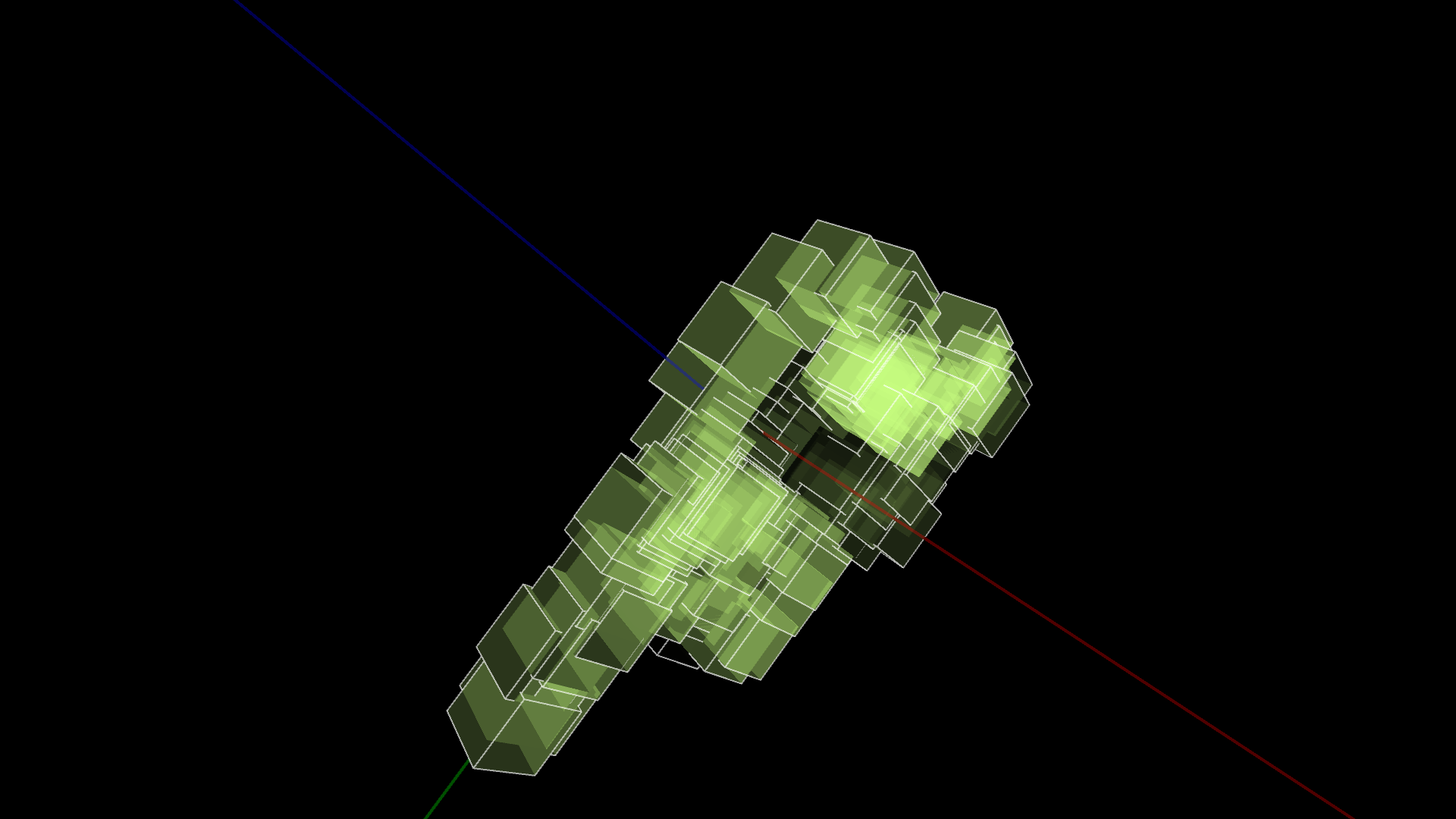
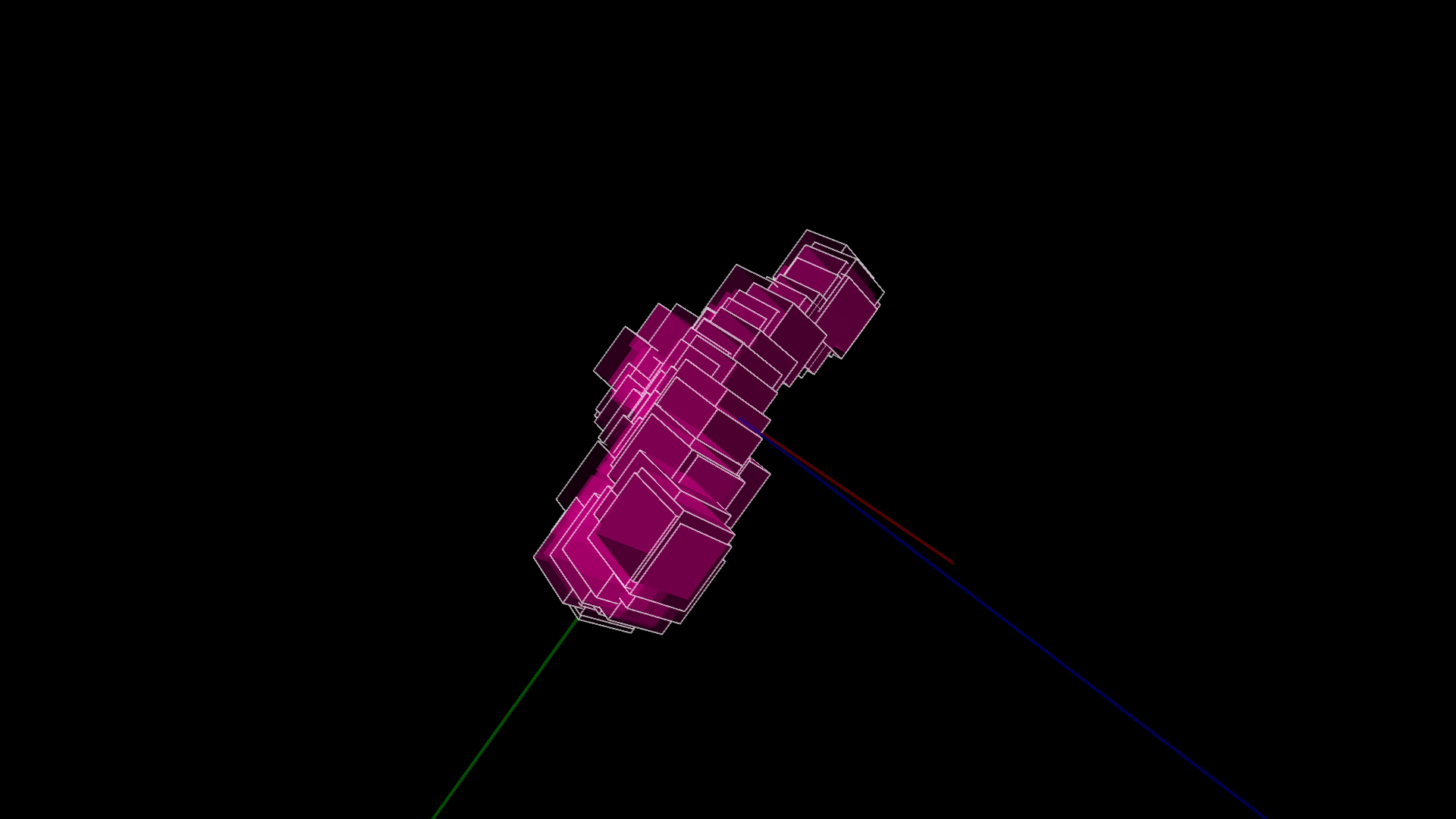
Demonstration of UWB-IMU capabilities at an art show
Guthman Music, Art, and Technology Fair 2025: I presented a UWB-IMU wand that transmits inertial data to a computer to create art based on the wand's movements.
Demonstration of Internet-in-a-box at HSAAT site
As part of an effort to enable access to information and education even in places with low Internet penetration, I demonstrated the idea of Internet-in-a-Box at the site of an old high school that is being redeveloped as a community center in Jackson, GA.
Museum Audio Guide for the Visually Impaired
Indoor localization technology is well suited to create broader impacts above and beyond what we anticipated in the proposal. An opportunity presented in Fall 2022 when an accessible exhibit was presented in the Georgia Tech Library (Extension of Self: what it means to be human in a digital world). My students Haige Chen and Zixin Yin created an audio guide for the exhibit space based on the concepts explored in the PnPLoc paper. Description of each art peice was stored on a phone with UWB. The phone captured information exchanged by a few anchors placed in the library and then played the appropriate audio based on which exhibit the user visited. Below are pictures of this system and the exhibition space.


 Click to Copy Bibtex
Click to Copy Bibtex